Initial Flights with Airborne Hydrography AB Chiroptera II system

Earlier this year the Nova Scotia Community College (NSCC) announced that the Government would invest over seven hundred thousand dollars through the Canada Foundation for Innovation (CFI) that would help researchers at the Applied Geomatics Research Group (AGRG) unlock some of Nova Scotia’s coastline mysteries known as the “white ribbon gap” from the challenges involved with mapping shallow water coastal areas. The project also made them the only college in Canada with a research bathymetric Laser Imaging Detection and Ranging (LIDAR) device.
Bathymetric LIDAR equipment provides the ability to measure subsurface topography in shallow water, offering a safe, cost-effective and efficient means of collecting data in difficult-to-access areas. This bathymetric LIDAR equipment is unique to most others as it can be mounted in an fixed wing aircraft to scan down into the water or can be mounted sideways onto a boat to also measure the coastline details.
Last month, Leading Edge Geomatics (LEG), one of the industry partners involved with the project, worked along with staff from the NSCC / AGRG to install the Airborne Hydrography AB Chiroptera II system into a Beechcraft King Air 90C fixed wing aircraft, to perform the team’s first ever data acquisition with the Topobathymetric system.
 Wayne Richardson, a Positioning/Project Manager with LEG has provided us with a general overview on the initial data acquisition Flights using the AHAB Chiroptera II topobathymetric system along with some sample data from their test flights of Sable Island.
Wayne Richardson, a Positioning/Project Manager with LEG has provided us with a general overview on the initial data acquisition Flights using the AHAB Chiroptera II topobathymetric system along with some sample data from their test flights of Sable Island.
Bathymetric LIDAR – System
The state of the art Chiroptera II system combines a 500 KHz topographic scanner and a 35 KHz Hydrographic scanner with a 60MP Leica RCD30 photogrammetric camera. The purpose of this system is to collect the littoral boundary and shallow water where it is difficult and expensive to capture with side scan or multi-beam systems, due to the navigation difficulties in shallow waters and harbours.
This system has the potential to provide a wealth of data for Inland waterways, where currently only physical measurements of the bottom of lakes and rivers are possible. The Chiroptera II is designed to penetrate to depths of up to 1.5 x Secchi depth. Depending on water clarity, it should be reasonable to expect that this system can penetrate to 15 m. While this type of system does present initial challenges to a team accustomed to flying strictly topo sensors, with foresight and good planning (and good weather), it is possible to overcome these challenges.
Installation
The installation of the system began bright and early Monday morning with few issues. The team was impressed with the Chiroptera’s construction and system integration. Considering that the sensor head contains two laser scanners, an RCD30 camera, and a second quality control camera, it is extremely small. The design and construction of the system is extremely efficient and robust.
Installation of the system went very smoothly and after lunch a calibration flight was scheduled. The system had been calibrated after assembly in Sweden and these bore site values were used as the starting point in the calculations of the misalignment angles. Impressively, after being shipped across the Atlantic in a crate and sitting untouched for months, the original calibration was relatively unchanged. With only minor tweaks to the calibration, the system was pronounced ready to acquire data that afternoon.
Operation
Anyone who has ever attempted to fly aerial surveys in the Atlantic Region of Canada will realize that it is extremely rare to find two consecutive days of cloud-free conditions. Even given the low altitudes that the system is meant to acquire data at (400 m), we were not expecting to move this initial project along as quickly as we did. Fortunately, the initial flights were launched during an uncommon consecutive series of sunny, clear days, some of the best flying weather in our collective memory.
The favourable weather allowed us to collect all of our priority projects in less than one week. The Chiroptera system is very user friendly and easy to learn. The team was able to run several operators through training during the collection, and all reported an easy to learn and operate interface. A few areas that were planned had to be recollected due to turbidity in the water column. The system allows the operator to review waveforms sampled during acquisition to determine the strength of the returns in order to ensure that the submerged ground is being sampled. This enables operators to quickly make decisions on the possible success of a mission and save precious flight time and expenses.
Data Processing
The processing application provided by AHAB is called LiDAR Survey Studio (LSS). Having used several other vendors’ proprietary LiDAR data processing applications, the team found LSS to be easy to configure, process, and output final data. The application combines a trajectory (processed with any SPAN capable inertial suite) with the raw waveform, and presents it in an intuitive and well laid-out interface.
Processing parameters are set via configuration files for system settings, processing settings (classification method), and calibration (sensor misalignment). The results of the processing provide positioned and fully classified LAS data. The user then examines the classification of the bottom hits and the derived water surface to determine if the classification was successful. If some modifications are required, changes are made and the data is run again until the classification represents the data appropriately.
The full 3D view displays the points quickly and smoothly, allowing the user to examine the processing results easily and manipulate the data to represent it as required. The tools for display provide a myriad of perspectives for representing the results. Selecting an individual return will bring up the corresponding waveform data and image.
These views aid in the determination of the accuracy of the data classification. The only limitation is the lack of manual classification tools. It would be useful to be able to change the classification of points based on the wealth of data contained in the full waveform and the rapidly available QC images. In practice, this may make it easier to determine if a return is in fact a bottom hit or submerged vegetation, instead of doing the classification clean up in a third party application without access to the waveform information.
Conclusion
 The Chiroptera II is a well-built, solid solution for shallow water collection. Our team was able to achieve excellent penetration results, but as expected, the system is heavily dependent on good water clarity.
The Chiroptera II is a well-built, solid solution for shallow water collection. Our team was able to achieve excellent penetration results, but as expected, the system is heavily dependent on good water clarity.
Areas such as the St John River would immediately block return data when entering from a tributary. This was not unexpected and murky water will remain an obstacle to this system. However, in areas where the water clarity is acceptable, the system performs admirably. The estuaries on the New Brunswick Northumberland shore yielded excellent results with almost all of the sea bottom mapped.
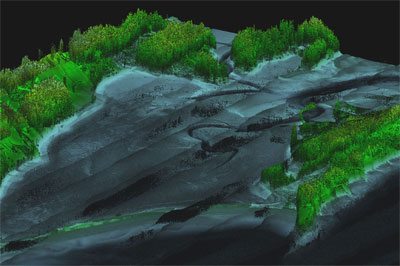
The Sable Island data showed surprising clarity with penetration to 15 m. The topographic scanner (sold stand alone as the Dragoneye) was tested on Sable Island in isolation from the bathymetric scanner.
This scanner performed well at 1400 m and provided ground sampling at better than one point per metre. The multiple look angle of the nutating scan pattern ensures minimal LiDAR shadows in the data, which could possibly eliminate the need for multiple passes. Overall the Chiroptera is an extremely capable, flexible and well-designed Topo-Bathymetric system.
For further information about the Initial Flights with the AHAB Chiroptera II, please visit www.legeo.ca, or contact sales@legeo.ca








{kind=link}
Leave a Reply
Want to join the discussion?Feel free to contribute!